![]()
プレスリリース
AI Lab、ロボティクス分野のトップカンファレンス「ICRA2025」にて2本の論文採択
ー 自律移動ロボットの新たな経路計画技術を提案 ー

株式会社サイバーエージェント(本社:東京都渋谷区、代表取締役:藤田晋、東証プライム市場:証券コード4751)は、人工知能技術の研究開発組織「AI Lab」におけるリサーチインターンシップ参加者のJiaqi Bao氏※1 ならびに研究員の米谷竜らによる論文2本がロボティクス分野の国際会議「2025 IEEE International Conference on Robots and Automation (ICRA 2025)」※2 に採択されたことをお知らせいたします。
「ICRA」は世界中の研究者や専門家が集まる国際会議で、「IROS」「RSS」「CoRL」※3 などと並び、ロボティクス分野で権威あるトップカンファレンスの一つです。このたび「AI Lab」から採択された論文は、2025年5月にアトランタで開催される「ICRA2025」で発表を行います。
「ICRA」は世界中の研究者や専門家が集まる国際会議で、「IROS」「RSS」「CoRL」※3 などと並び、ロボティクス分野で権威あるトップカンファレンスの一つです。このたび「AI Lab」から採択された論文は、2025年5月にアトランタで開催される「ICRA2025」で発表を行います。
■背景
昨今、日本国内では労働力不足が深刻化しており、特に小売・流通業では人材確保が大きな課題となっています。このような状況の中、自律移動ロボットの活用による在庫管理や棚卸し、巡回清掃などの店舗業務の自動化が、人手不足問題の解決手段として注目されています。
一方、店舗環境は常に変化する動的な空間であり、来店客や障害物の存在を考慮した経路決定が求められます。また、巡回すべきエリアが広範囲に及ぶ場合、計算コストが膨大になり、実用化に向けた大きな課題となっています。
AI Labでは、これまで遠隔接客や販促におけるロボットの実用化に向けた研究開発・実証実験を推進してまいりました。また近年では、自律移動技術の基礎研究も開始し、ロボットが店内を巡回しながら業務を遂行するための技術開発にも取り組んでおります。
昨今、日本国内では労働力不足が深刻化しており、特に小売・流通業では人材確保が大きな課題となっています。このような状況の中、自律移動ロボットの活用による在庫管理や棚卸し、巡回清掃などの店舗業務の自動化が、人手不足問題の解決手段として注目されています。
一方、店舗環境は常に変化する動的な空間であり、来店客や障害物の存在を考慮した経路決定が求められます。また、巡回すべきエリアが広範囲に及ぶ場合、計算コストが膨大になり、実用化に向けた大きな課題となっています。
AI Labでは、これまで遠隔接客や販促におけるロボットの実用化に向けた研究開発・実証実験を推進してまいりました。また近年では、自律移動技術の基礎研究も開始し、ロボットが店内を巡回しながら業務を遂行するための技術開発にも取り組んでおります。
◼️論文の概要
今回採択された2本の論文では、自律移動ロボットの基盤技術の1つである「経路計画」に関する新たな方式を提案しています。大規模言語モデルや拡散モデルといった近年の生成AI技術を活用することで、より効率的かつ直感的な経路計画を実現します。
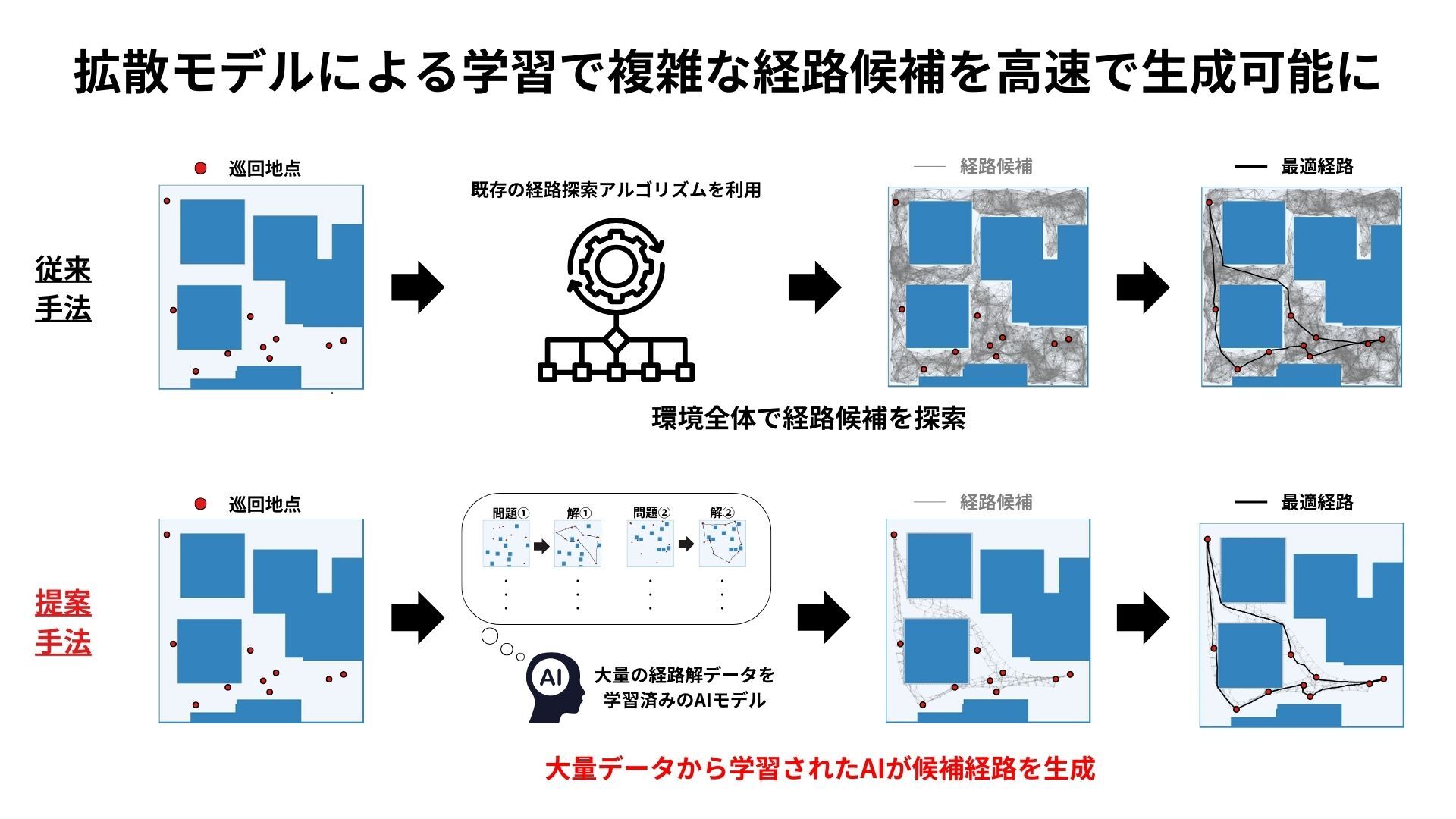
「TSPDiffuser: Diffusion Models as Learned Samplers for Traveling Salesperson Path Planning Problems」
著者:米谷竜(サイバーエージェント AI Lab)
著者:米谷竜(サイバーエージェント AI Lab)
| 自律移動ロボットの巡回経路を最適化する際、巡回ポイント間のすべての組み合わせに対して経路計算が必要となり、巡回ポイントが多く複雑な空間では膨大な計算コストが発生します。 本研究で提案したアルゴリズム「TSPDiffuser」では、多様な経路計画問題とその解経路の組を大量に用意し、拡散モデルによって学習することで、新たな空間や巡回ポイントに対して経路候補を高速で生成することを可能にしました。 これにより、リアルタイムな経路最適化ができるようになり、店舗における業務のさらなる効率化が期待できます。 実際の屋内・屋外地図データを用いた評価実験を通して、提案アルゴリズムの有効性を確認しました。 |
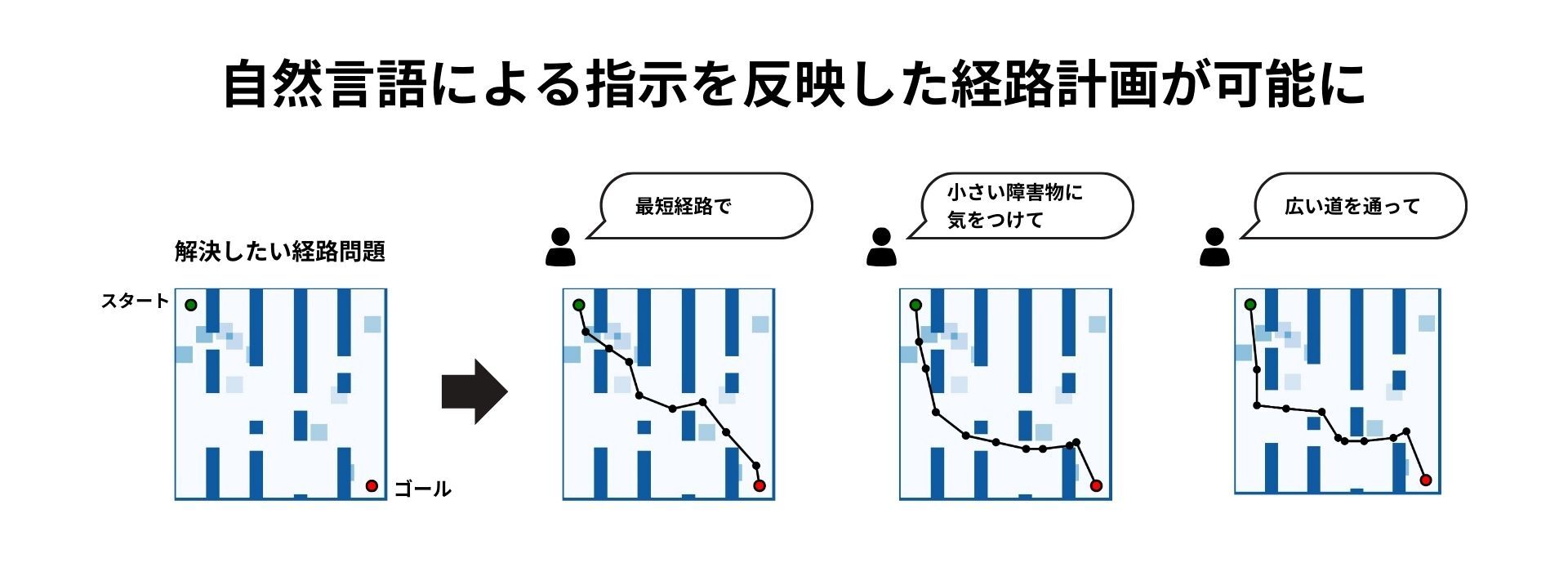
「Path Planning using Instruction-Guided Probabilistic Roadmaps」
著者:Jiaqi Bao(北海道大学)・米谷竜(サイバーエージェント AI Lab)
| 従来の経路計画では、空間における障害物の配置と目標地点のみを指定することで最短経路を探索する手法が用いられていましたが、動的な空間における柔軟な経路計画を実行することは困難でした。 本研究では、大規模言語モデルによるベクトル埋め込みを活用することで、「広い道を優先」「障害物を避ける」などの自然言語による指示を反映した経路計画が可能となるアルゴリズムを提案しました。 これにより店舗運営者が直感的にロボットの移動パターンを調整できるようになり、販促効果の最大化やスムーズな店舗運営への応用が期待できます。 現実の複雑な地形を考慮したシミュレーション実験によって、提案手法の有効性を確認しています。 |
◼️今後
今回採択された2つの論文では、自律移動ロボットの新たな経路計画手法を提案しました。本研究成果を当社のリテールメディア事業に応用することで、販促ロボットを人通りの多いエリアへ安全かつ迅速に移動させ販促効果の最大化を図るなど、小売企業の収益向上に貢献します。
「AI Lab」 は今後も、当社事業部門や小売企業をはじめとするパートナーと連携し、自律移動ロボットの社会実装に向けた研究・開発を推進してまいります。
※1 北海道大学所属・2024/2/1より リサーチインターンシップに参加
※2 https://2025.ieee-icra.org/
※3 「IROS」IEEE/RSJ International Conference on Intelligent Robots and Systems
「RSS」Robotics: Science and Systems
「CoRL」The Conference on Robot Learning
今回採択された2つの論文では、自律移動ロボットの新たな経路計画手法を提案しました。本研究成果を当社のリテールメディア事業に応用することで、販促ロボットを人通りの多いエリアへ安全かつ迅速に移動させ販促効果の最大化を図るなど、小売企業の収益向上に貢献します。
「AI Lab」 は今後も、当社事業部門や小売企業をはじめとするパートナーと連携し、自律移動ロボットの社会実装に向けた研究・開発を推進してまいります。
※1 北海道大学所属・2024/2/1より リサーチインターンシップに参加
※2 https://2025.ieee-icra.org/
※3 「IROS」IEEE/RSJ International Conference on Intelligent Robots and Systems
「RSS」Robotics: Science and Systems
「CoRL」The Conference on Robot Learning